今度はBME280温湿度・気圧センサーの動作確認です。これもL3GD20ジャイロセンサーと一緒にストロベリーリナックスさんから購入したものです。
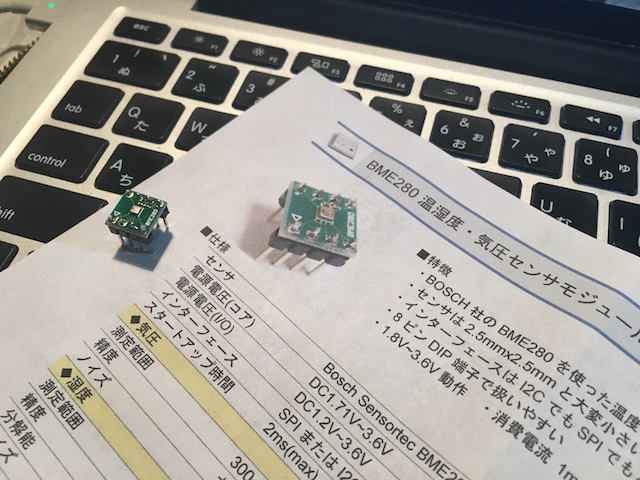
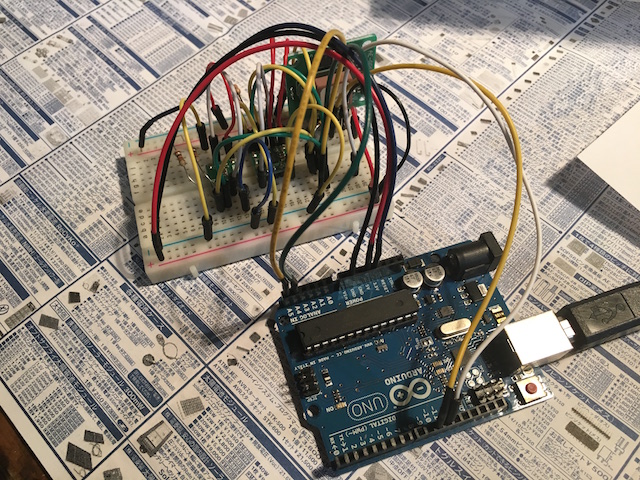
同封されていた説明書を見ながらすでにGPSと3軸ジャイロセンサーの載ったブレッドボードの上で配線します。写真ではなんだかわからないと思いますが、配線は説明書に書いてある通りにやっています。(説明書にあるようにSA0をGNDに接続しました)
少し寄った写真。わかりませんね。
これらのモジュールを同時に使用することを考えているので、すべてブレッドボード上に配線しています。
前回、L3GD20の時に利用したライブラリが便利だったので、ほぼ同じ書き方でBME280用のライブラリを書きました。L3GD20のライブラリはI2CとSPIのどちらにも対応したものでしたが、これはI2Cのみ対応するものです。(投稿の最後にソースを載せておきます。
ライブラリの中身はスイッチサイエンスさんが公開している「BME280搭載 温湿度・気圧センサモジュールの使い方」を参考にさせていただきました。センサーが取り込んだ生データを補正する部分のロジックを書くのが大変そうだったので楽をさせていただきました。
作成したライブラリを使ったテストプログラムはこんな感じ。
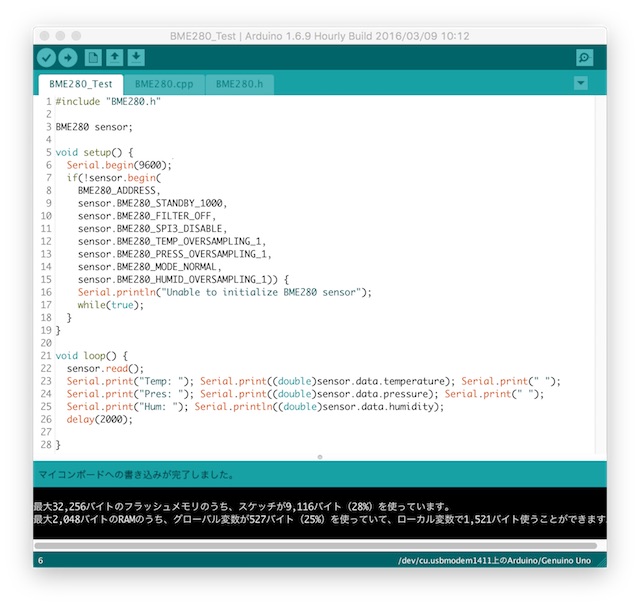
こちらは実行結果です。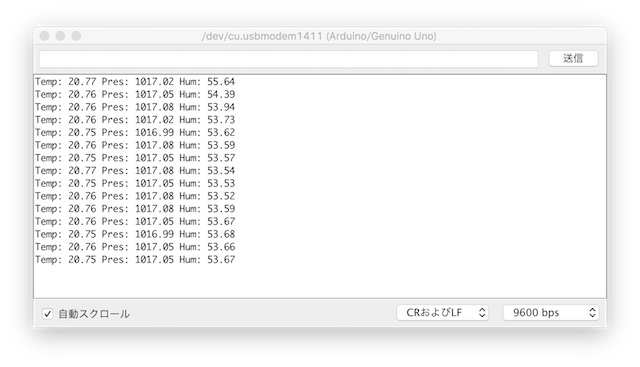
ここまでの段階でGPSによる位置、3軸ジャイロによる方向、温度、湿度、気圧が一つのプログラムで取れるようになりました。地磁気センサーも入手してありますが、3軸ジャイロがあれば使う必要がないかもしれません。あとはホールセンサーを使って自転車のタイヤの回転数を取って、照度センサーで明るさを取れれば、自転車用の車載コンピューターに(僕が)求める機能はほぼ実装できます。こんなに容易にマイコンのファームウェアを開発できるのって凄いなと思いますし、面白いです。
今回作成したライブラリはいずれSPIにも対応したものにしようと思いますが、当面は自分の用途ではI2Cを使えれば十分なので、機会があったらやることになると思います。
以下に今回作成したライブラリのソースを載せておきます。
BME280.h
#ifndef _BME280_h
#define _BME280_h
#if (ARDUINO >= 100)
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
#include "Wire.h"
//#define BME280_ADDRESS (0x77) // 1110111 (if SA0 connected to VDDIO)
#define BME280_ADDRESS (0x76) // 1110110 (if SA0 connected to GND)
#define BME280_ID (0x60)
class BME280
{
public:
typedef enum
{
BME280_REGISTER_CALLIB25 = 0xA1,
BME280_REGISTER_CALLIB26 = 0xE1,
BME280_REGISTER_WHO_AM_I = 0xD0,
BME280_REGISTER_RESET = 0xE0,
BME280_REGISTER_CTRL_HUMIDITY = 0xF2,
BME280_REGISTER_STATUS = 0xF3,
BME280_REGISTER_CTRL_MEASURE = 0xF4,
BME280_REGISTER_CONFIG = 0xF5,
BME280_REGISTER_PRESSURE_MSB = 0xF7,
BME280_REGISTER_PRESSURE_LSB = 0xF8,
BME280_REGISTER_PRESSURE_XLSB = 0xF9,
BME280_REGISTER_TEMPERATURE_MSB = 0xFA,
BME280_REGISTER_TEMPERATURE_LSB = 0xFB,
BME280_REGISTER_TEMPERATURE_XLSB= 0xFC,
BME280_REGISTER_HUMIDITY_MSB = 0xFD,
BME280_REGISTER_HUMIDITY_LSB = 0xFE
} BME280Register;
// used by config()
typedef enum
{
BME280_STANDBY_0_5 = 0x00,
BME280_STANDBY_62_5 = 0x01,
BME280_STANDBY_125 = 0x02,
BME280_STANDBY_250 = 0x03,
BME280_STANDBY_500 = 0x04,
BME280_STANDBY_1000 = 0x05,
BME280_STANDBY_10 = 0x06,
BME280_STANDBY_20 = 0x07
} BME280Standby;
typedef enum
{
BME280_FILTER_OFF = 0x00,
BME280_FILTER_2 = 0x01,
BME280_FILTER_4 = 0x02,
BME280_FILTER_8 = 0x03,
BME280_FILTER_16 = 0x04
} BME280Filter;
typedef enum
{
BME280_SPI3_ENABLE = 0x01,
BME280_SPI3_DISABLE = 0x00
} BME280SpiMode;
// used by control measure
typedef enum
{
BME280_TEMP_OVERSAMPLING_SKIP = 0x00,
BME280_TEMP_OVERSAMPLING_1 = 0x01,
BME280_TEMP_OVERSAMPLING_2 = 0x02,
BME280_TEMP_OVERSAMPLING_4 = 0x03,
BME280_TEMP_OVERSAMPLING_8 = 0x04,
BME280_TEMP_OVERSAMPLING_16 = 0x05
} BME280TemperatureOversampling;
typedef enum
{
BME280_PRESS_OVERSAMPLING_SKIP = 0x00,
BME280_PRESS_OVERSAMPLING_1 = 0x01,
BME280_PRESS_OVERSAMPLING_2 = 0x02,
BME280_PRESS_OVERSAMPLING_4 = 0x03,
BME280_PRESS_OVERSAMPLING_8 = 0x04,
BME280_PRESS_OVERSAMPLING_16 = 0x05
} BME280PressureOversampling;
typedef enum
{
BME280_MODE_SLEEP = 0x00,
BME280_MODE_FORCED = 0x01,
BME280_MODE_NORMAL = 0x03
} BME280Mode;
// used by control humidity
typedef enum
{
BME280_HUMID_OVERSAMPLING_SKIP = 0x00,
BME280_HUMID_OVERSAMPLING_1 = 0x01,
BME280_HUMID_OVERSAMPLING_2 = 0x02,
BME280_HUMID_OVERSAMPLING_4 = 0x03,
BME280_HUMID_OVERSAMPLING_8 = 0x04,
BME280_HUMID_OVERSAMPLING_16 = 0x05
} BME280HumidityOversampling;
typedef struct bme280data
{
double temperature;
double pressure;
double humidity;
} BME280Data;
BME280();
bool begin(
byte addr,
BME280Standby sb,
BME280Filter fil,
BME280SpiMode spi3,
BME280TemperatureOversampling to,
BME280PressureOversampling po,
BME280Mode md,
BME280HumidityOversampling ho);
void read();
BME280Data data;
private:
void readTrim();
void readRawData();
signed long calibratedTemperature(signed long int rawT);
unsigned long calibratedPressure(signed long int rawP);
unsigned long calibratedHumidity(signed long int rawH);
void write8(BME280Register reg, byte value);
byte read8(BME280Register reg);
byte address;
uint8_t conf, ctrl_meas, ctrl_hum;
unsigned long int hum_raw, temp_raw, press_raw;
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
int8_t dig_H1;
int16_t dig_H2;
int8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
signed long int t_fine;
};
#endif
BME280.cpp
#include "BME280.h"
// i2c constructore
BME280::BME280() {
}
bool BME280::begin(
byte addr,
BME280Standby sb,
BME280Filter fil,
BME280SpiMode spi3,
BME280TemperatureOversampling to,
BME280PressureOversampling po,
BME280Mode md,
BME280HumidityOversampling ho)
{
Wire.begin();
address = addr;
conf = (sb << 5) | (fil << 2) | spi3;
ctrl_meas = (to << 5) | (po << 2) | md;
ctrl_hum = ho;
uint8_t id = read8(BME280_REGISTER_WHO_AM_I);
if(id != BME280_ID) {
return false;
}
// config
write8(BME280_REGISTER_CONFIG, conf);
// ctrl_meas
write8(BME280_REGISTER_CTRL_MEASURE, ctrl_meas);
// ctrl_hum
write8(BME280_REGISTER_CTRL_HUMIDITY, ctrl_hum);
readTrim();
return true;
}
void BME280::read() {
signed long temp_cal;
unsigned long press_cal, hum_cal;
readRawData();
temp_cal = calibratedTemperature(temp_raw);
press_cal = calibratedPressure(press_raw);
hum_cal = calibratedHumidity(hum_raw);
data.temperature = (double)temp_cal / 100.0;
data.pressure = (double)press_cal / 100.0;
data.humidity = (double)hum_cal / 1024.0;
}
void BME280::readTrim() {
uint8_t data[32], i = 0;
Wire.beginTransmission(address);
Wire.write(0x88);
Wire.endTransmission();
Wire.requestFrom((uint8_t)address, (uint8_t)24);
while(Wire.available()) {
data[i++] = Wire.read();
}
data[i++] = read8(BME280_REGISTER_CALLIB25);
Wire.beginTransmission(address);
Wire.write(BME280_REGISTER_CALLIB26);
Wire.endTransmission();
Wire.requestFrom((uint8_t)address, (uint8_t)7);
while(Wire.available()) {
data[i++] = Wire.read();
}
dig_T1 = (data[1] << 8) | data[0];
dig_T2 = (data[3] << 8) | data[2];
dig_T3 = (data[5] << 8) | data[4];
dig_P1 = (data[7] << 8) | data[6];
dig_P2 = (data[9] << 8) | data[8];
dig_P3 = (data[11] << 8) | data[10];
dig_P4 = (data[13] << 8) | data[12];
dig_P5 = (data[15] << 8) | data[14];
dig_P6 = (data[17] << 8) | data[16];
dig_P7 = (data[19] << 8) | data[18];
dig_P8 = (data[21] << 8) | data[20];
dig_P9 = (data[23] << 8) | data[22];
dig_H1 = data[24];
dig_H2 = (data[26] << 8) | data[25];
dig_H3 = data[27];
dig_H4 = (data[28] << 4) | (0x0F & data[29]);
dig_H5 = (data[30] << 4) | ((data[29] >> 4) & 0x0F);
dig_H6 = data[31];
}
void BME280::readRawData() {
int i = 0;
uint32_t data[8];
Wire.beginTransmission(address);
Wire.write(BME280_REGISTER_PRESSURE_MSB);
Wire.endTransmission();
Wire.requestFrom((uint8_t)address, (uint8_t)8);
while(Wire.available()) {
data[i++] = Wire.read();
}
press_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4);
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4);
hum_raw = (data[6] << 8) | data[7]; } signed long BME280::calibratedTemperature(signed long int adc_T) { signed long int var1, var2, T; var1 = ((((adc_T >> 3) - ((signed long int)dig_T1<<1))) * ((signed long int)dig_T2)) >> 11;
var2 = (((((adc_T >> 4) - ((signed long int)dig_T1)) * ((adc_T>>4) - ((signed long int)dig_T1))) >> 12) * ((signed long int)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
unsigned long BME280::calibratedPressure(signed long int adc_P) {
signed long int var1, var2;
unsigned long int P;
var1 = (((signed long int)t_fine)>>1) - (signed long int)64000;
var2 = (((var1>>2) * (var1>>2)) >> 11) * ((signed long int)dig_P6);
var2 = var2 + ((var1*((signed long int)dig_P5))<<1); var2 = (var2>>2)+(((signed long int)dig_P4)<<16); var1 = (((dig_P3 * (((var1>>2)*(var1>>2)) >> 13)) >>3) + ((((signed long int)dig_P2) * var1)>>1))>>18;
var1 = ((((32768+var1))*((signed long int)dig_P1))>>15);
if (var1 == 0)
{
return 0;
}
P = (((unsigned long int)(((signed long int)1048576)-adc_P)-(var2>>12)))*3125;
if(P<0x80000000)
{
P = (P << 1) / ((unsigned long int) var1); } else { P = (P / (unsigned long int)var1) * 2; } var1 = (((signed long int)dig_P9) * ((signed long int)(((P>>3) * (P>>3))>>13)))>>12;
var2 = (((signed long int)(P>>2)) * ((signed long int)dig_P8))>>13;
P = (unsigned long int)((signed long int)P + ((var1 + var2 + dig_P7) >> 4));
return P;
}
unsigned long BME280::calibratedHumidity(signed long int adc_H) {
signed long int v_x1;
v_x1 = (t_fine - ((signed long int)76800));
v_x1 = (((((adc_H << 14) -(((signed long int)dig_H4) << 20) - (((signed long int)dig_H5) * v_x1)) + ((signed long int)16384)) >> 15) * (((((((v_x1 * ((signed long int)dig_H6)) >> 10) *
(((v_x1 * ((signed long int)dig_H3)) >> 11) + ((signed long int) 32768))) >> 10) + (( signed long int)2097152)) *
((signed long int) dig_H2) + 8192) >> 14));
v_x1 = (v_x1 - (((((v_x1 >> 15) * (v_x1 >> 15)) >> 7) * ((signed long int)dig_H1)) >> 4));
v_x1 = (v_x1 < 0 ? 0 : v_x1); v_x1 = (v_x1 > 419430400 ? 419430400 : v_x1);
return (unsigned long int)(v_x1 >> 12);
}
void BME280::write8(BME280Register reg, byte value)
{
Wire.beginTransmission(address);
Wire.write((byte)reg);
Wire.write(value);
Wire.endTransmission();
}
byte BME280::read8(BME280Register reg)
{
byte value;
Wire.beginTransmission(address);
Wire.write((byte)reg);
Wire.endTransmission();
Wire.requestFrom(address, (byte)1);
value = Wire.read();
Wire.endTransmission();
return value;
}

ディスカッション
コメントはまだありません。